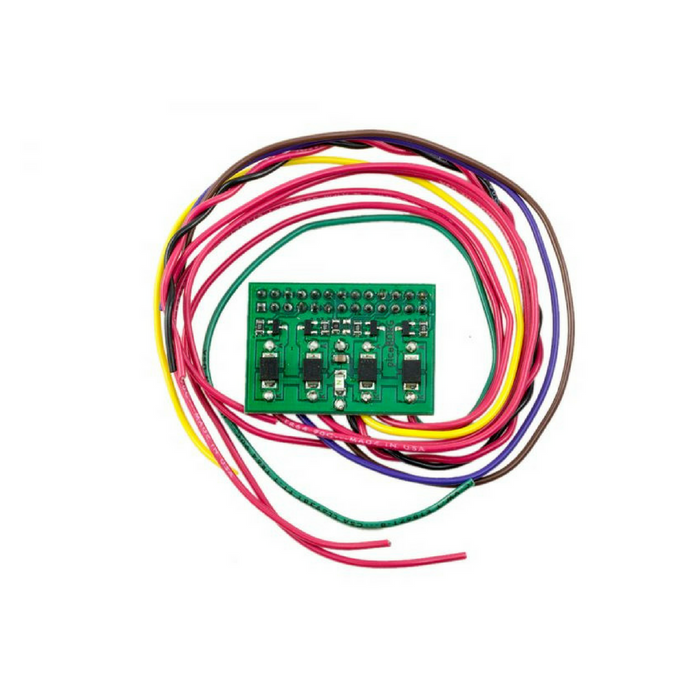
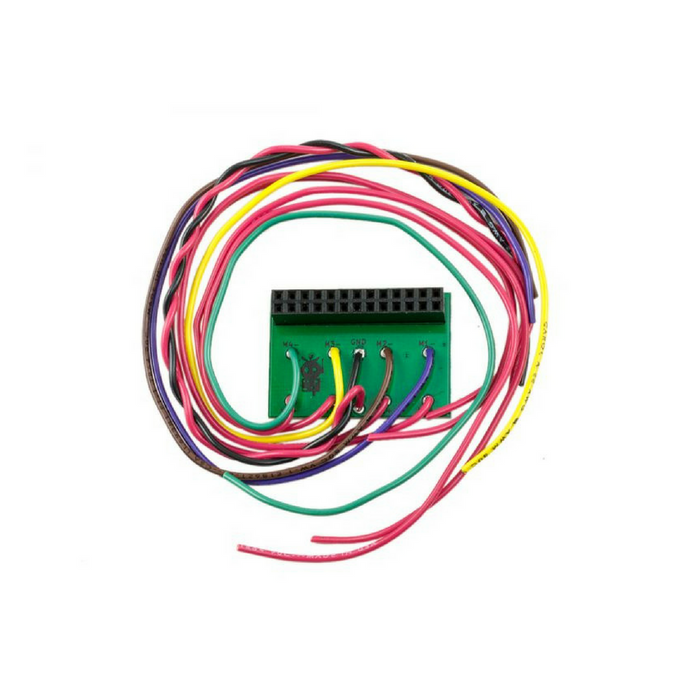
PicoBorg - Quad Motor Controller with Soldered Wires
by PiBorg
SKU PIS-0918
Original price
£12.08
-
Original price
£12.08
Original price
(ex:Vat)
£12.08
£12.08
-
£12.08
Current price
£12.08
Availability:
Low stock